La válvula electrónica, también llamada válvula termoiónica, válvula de vacío, tubo de vacío o bulbo, es un componente electrónico utilizado para amplificar, conmutar, o modificar una señal eléctrica mediante el control del movimiento de los electrones en un espacio "vacío" a muy baja presión, o en presencia de gases especialmente seleccionados. La válvula originaria fue el componente crítico que posibilitó el desarrollo de la electrónica durante la primera mitad del siglo XX, incluyendo la expansión y comercialización de la radiodifusión, televisión, radar, audio, redes telefónicas, computadoras analógicas y digitales, control industrial, etc. Algunas de estas aplicaciones son anteriores a la válvula, pero vivieron un crecimiento explosivo gracias a ella.
A lo largo de su historia, fueron introducidos muchísimos tipos de válvulas, pero los principios de funcionamiento básicos son:
Efecto Edison. La gran mayoría de las válvulas electrónicas están basadas en la propiedad que tienen los metales en caliente de liberar electrones desde su superficie.
Gases ionizados. En otros casos, se utilizan las características de la conducción electrónica en gases ionizados, esto resulta principalmente importante en los reguladores de tensión, rectificadores de vapor de mercurio, válvula de conmutación T/R, etc.
Efecto fotoeléctrico En otros casos, el principio de funcionamiento se basa en la emisión de electrones por el efecto fotoeléctrico.

ENIAC: Es un acrónimo de Electronic Numerical Integrator And Computer (Computador e Integrador Numérico Electrónico), utilizada por el Laboratorio de Investigación Balística del Ejército de los Estados Unidos.
Se ha considerado a menudo la primera computadora electrónica de propósito general, aunque este título pertenece en realidad a la computadora alemana Z3. Además está relacionada con el Colossus, que se usó para descifrar código alemán durante la Segunda Guerra Mundial y destruido tras su uso para evitar dejar pruebas, siendo recientemente restaurada para un museo británico. Era totalmente digital, es decir, que ejecutaba sus procesos y operaciones mediante instrucciones en lenguaje máquina, a diferencia de otras máquinas computadoras contemporáneas de procesos analógicos. Presentada en público el 15 de febrero de 1946.
La ENIAC fue construida en la Universidad de Pennsylvania por John Presper Eckert y John William Mauchly, ocupaba una superficie de 167 m² y operaba con un total de 17.468 válvulas electrónicas o tubos de vacío que a su vez permitían realizar cerca de 5000 sumas y 300 multiplicaciones por segundo. Físicamente, la ENIAC tenía 17.468 tubos de vacío, 7.200 diodos de cristal, 1.500 relés, 70.000 resistencias, 10.000 condensadores y 5 millones de soldaduras. Pesaba 27 Tm, medía 2,4 m x 0,9 m x 30 m; utilizaba 1.500 conmutadores electromagnéticos y relés; requería la operación manual de unos 6.000 interruptores, y su programa o software, cuando requería modificaciones, demoraba semanas de instalación manual.
La ENIAC elevaba la temperatura del local a 50 °C. Para efectuar las diferentes operaciones era preciso cambiar, conectar y reconectar los cables como se hacía, en esa época, en las centrales telefónicas, de allí el concepto. Este trabajo podía demorar varios días dependiendo del cálculo a realizar.
Uno de los mitos que rodea a este aparato es que la ciudad de Filadelfia, donde se encontraba instalada, sufría de apagones cuando la ENIAC entraba en funcionamiento, pues su consumo era de 160 kW.
A las 23.45 del 2 de octubre de 1955, la ENIAC fue desactivada para siempre.
La computadora podía calcular trayectorias de proyectiles, lo cual fue el objetivo primario al construirla. En 1,5 segundos era posible calcular la potencia 5000 de un número de hasta 5 cifras.
La ENIAC podía resolver 5.000 sumas y 300 multiplicaciones en 1 segundo. Pero entre las anécdotas estaba la poco promisoria cifra de un tiempo de rotura de 1 hora.
Transistor:
El transistor es un dispositivo electrónico semiconductor que cumple funciones de amplificador, oscilador, conmutador o rectificador. El término "transistor" es la contracción en inglés de transfer resistor ("resistencia de transferencia"). Actualmente se los encuentra prácticamente en todos los aparatos domésticos de uso diario: radios, televisores, grabadoras, reproductores de audio y video, hornos de microondas, lavadoras, automóviles, equipos de refrigeración, alarmas, relojes de cuarzo, computadoras, calculadoras, impresoras, lámparas fluorescentes, equipos de rayos X, tomógrafos, ecógrafos, reproductores mp3, teléfonos móviles, etc.

Circuito integrado:
Un circuito integrado (CI), también conocido como chip o microchip, es una pastilla pequeña de material semiconductor, de algunos milímetros cuadrados de área, sobre la que se fabrican circuitos electrónicos generalmente mediante fotolitografía y que está protegida dentro de un encapsulado de plástico o cerámica. El encapsulado posee conductores metálicos apropiados para hacer conexión entre la pastilla y un circuito impreso.

IBM 360:
El 360 fue el primero en usar microprogramación, y creó el concepto de arquitectura de familia. La familia del 360 consistió en 6 ordenadores que podían hacer uso del mismo software y los mismos periféricos. El sistema también hizo popular la computación remota, con terminales conectados a un servidor, por medio de una línea telefónica. Así mismo, es célebre por contar con el primer procesador en implementar el algoritmo de Tomasulo en su unidad de punto flotante.
El IBM 360 es uno de los primeros ordenadores comerciales que usó circuitos integrados, y podía realizar tanto análisis numéricos como administración o procesamiento de archivos. Se considera que la tercera generación de computadoras comenzó con su introducción.
Fue el primer computador en ser atacado con un virus en la historia de la informática; y ese primer virus que atacó a esta máquina IBM Serie 360 (y reconocido como tal), fue el Creeper, creado en 1972

Nanotecnología:
La nanotecnología es un campo de las ciencias aplicadas dedicado al control y manipulación de la materia a una escala menor que un micrómetro, es decir, a nivel de átomos y moléculas (nanomateriales). Lo más habitual es que tal manipulación se produzca en un rango de entre uno y cien nanómetros. Se tiene una idea de lo pequeño que puede ser un nanobot sabiendo que un nanobot de unos 50 nm tiene el tamaño de 5 capas de moléculas o átomos -depende de qué esté hecho el nanobot-.
Nano- es un prefijo griego que indica una medida, no un objeto, de manera que la nanotecnología se caracteriza por ser un campo esencialmente multidisciplinar, y cohesionado exclusivamente por la escala de la materia con la que trabaja.

Interfaz de usuario:
Las interfaces básicas de usuario son aquellas que incluyen elementos como menús, ventanas, teclado, ratón, los beeps y algunos otros sonidos que la computadora hace, y en general, todos aquellos canales por los cuales se permite la comunicación entre el ser humano y la computadora. La mejor interacción humano-máquina a través de una adecuada interfaz (Interfaz de Usuario), que le brinde tanto comodidad, como eficiencia.

Fragmentacion:
La desfragmentación es el proceso mediante el cual se acomodan los archivos de un disco de tal manera que cada uno quede en un área contigua y sin espacios sin usar entre ellos. Al irse escribiendo y borrando archivos continuamente en el disco duro, éstos tienden a no quedar en áreas contiguas, así, un archivo puede quedar "partido" en muchos pedazos a lo largo del disco, se dice entonces que el archivo está "fragmentado". Al tener los archivos esparcidos por el disco, se vuelve ineficiente el acceso a ellos.
El problema de almacenamiento no contiguo de archivos se denomina fragmentación, se produce debido al almacenamiento de archivos en dispositivos como disco duro y memoria RAM por el uso del computador.
La fragmentación es un problema que surge debido al ordenamiento interno de los datos en algunos sistema de archivos. Se da muy comúnmente en el sistema operativo Windows aunque también afecta a otras plataformas pero en una escala mucho menor. También se produce fragmentación dentro de la memoria del computador (memoria RAM) cuando se asignan los procesos a los diferentes bloques de memoria. Existen dos tipos de fragmentación: doble y triple.
Desfragmentar no hace que el ordenador trabaje más rapido, sino que hace que la navegación por los archivos sea mas rápida.

Swap (Espacio de intercambio): En informática, el espacio de intercambio es una zona del disco (un fichero o partición) que se usa para guardar las imágenes de los procesos que no han de mantenerse en memoria física. A este espacio se le suele llamar swap, del inglés "intercambiar".
La mayoría de los sistemas operativos modernos poseen un mecanismo llamado memoria virtual, que permite hacer creer a los programas que tienen más memoria que la disponible realmente; por ejemplo, 4 Gb en un ordenador de 32 bits. Como en realidad no se tiene físicamente toda esa memoria, algunos procesos no podrán ser ubicados en la memoria RAM.
En este caso es cuando es útil el espacio de intercambio: el sistema operativo puede buscar un proceso poco activo, y moverlo al área de intercambio (el disco duro) y de esa forma liberar la memoria principal para cargar otros procesos. Mientras no haga falta, el proceso extraído de memoria puede quedarse en el disco, ya que ahí no gasta memoria física. Cuando sea necesario, el sistema vuelve a hacer un intercambio, pasándolo del disco a memoria RAM. Es un proceso lento (comparado con usar sólo la memoria RAM), pero permite dar la impresión de que hay más memoria disponible.
Memoria virtual (De Windows): La memoria virtual es una técnica de administración de la memoria real que permite al sistema operativo brindarle al software de usuario y a sí mismo un espacio de direcciones mayor que la memoria real o física.
La mayoría de los ordenadores tienen cuatro tipos de memoria: registros en la CPU, la memoria caché (tanto dentro como fuera del CPU), la memoria física (generalmente en forma de RAM, donde la CPU puede escribir y leer directa y razonablemente rápido) y el disco duro que es mucho más lento, pero también más grande y barato.
Muchas aplicaciones requieren el acceso a más información (código y datos) que la que se puede mantener en memoria física. Esto es así sobre todo cuando el sistema operativo permite múltiples procesos y aplicaciones ejecutándose simultáneamente. Una solución al problema de necesitar mayor cantidad de memoria de la que se posee consiste en que las aplicaciones mantengan parte de su información en disco, moviéndola a la memoria principal cuando sea necesario. Hay varias formas de hacer esto. Una opción es que la aplicación misma sea responsable de decidir qué información será guardada en cada sitio (segmentación), y de traerla y llevarla. La desventaja de esto, además de la dificultad en el diseño e implementación del programa, es que es muy probable que los intereses sobre la memoria de dos o varios programas generen conflictos entre sí: cada programador podría realizar su diseño teniendo en cuenta que es el único programa ejecutándose en el sistema. La alternativa es usar memoria virtual, donde la combinación entre hardware especial y el sistema operativo hace uso de la memoria principal y la secundaria para hacer parecer que el ordenador tiene mucha más memoria principal (RAM) que la que realmente posee. Este método es invisible a los procesos. La cantidad de memoria máxima que se puede hacer ver que hay tiene que ver con las características del procesador. Por ejemplo, en un sistema de 32 bits, el máximo es 232, lo que da 4096 Megabytes (4 Gigabytes). Todo esto hace el trabajo del programador de aplicaciones mucho más fácil, al poder ignorar completamente la necesidad de mover datos entre los distintos espacios de memoria.
Aunque la memoria virtual podría estar implementada por el software del sistema operativo, en la práctica casi siempre se usa una combinación de hardware y software, dado el esfuerzo extra que implicaría para el procesador.
La mayoría de los ordenadores tienen cuatro tipos de memoria: registros en la CPU, la memoria caché (tanto dentro como fuera del CPU), la memoria física (generalmente en forma de RAM, donde la CPU puede escribir y leer directa y razonablemente rápido) y el disco duro que es mucho más lento, pero también más grande y barato.
Muchas aplicaciones requieren el acceso a más información (código y datos) que la que se puede mantener en memoria física. Esto es así sobre todo cuando el sistema operativo permite múltiples procesos y aplicaciones ejecutándose simultáneamente. Una solución al problema de necesitar mayor cantidad de memoria de la que se posee consiste en que las aplicaciones mantengan parte de su información en disco, moviéndola a la memoria principal cuando sea necesario. Hay varias formas de hacer esto. Una opción es que la aplicación misma sea responsable de decidir qué información será guardada en cada sitio (segmentación), y de traerla y llevarla. La desventaja de esto, además de la dificultad en el diseño e implementación del programa, es que es muy probable que los intereses sobre la memoria de dos o varios programas generen conflictos entre sí: cada programador podría realizar su diseño teniendo en cuenta que es el único programa ejecutándose en el sistema. La alternativa es usar memoria virtual, donde la combinación entre hardware especial y el sistema operativo hace uso de la memoria principal y la secundaria para hacer parecer que el ordenador tiene mucha más memoria principal (RAM) que la que realmente posee. Este método es invisible a los procesos. La cantidad de memoria máxima que se puede hacer ver que hay tiene que ver con las características del procesador. Por ejemplo, en un sistema de 32 bits, el máximo es 232, lo que da 4096 Megabytes (4 Gigabytes). Todo esto hace el trabajo del programador de aplicaciones mucho más fácil, al poder ignorar completamente la necesidad de mover datos entre los distintos espacios de memoria.
Aunque la memoria virtual podría estar implementada por el software del sistema operativo, en la práctica casi siempre se usa una combinación de hardware y software, dado el esfuerzo extra que implicaría para el procesador.
Kernel:
En informática, un núcleo o kernel (de la raíz germánica Kern) es un software que actúa de sistema operativo.1 2 Es el principal responsable de facilitar a los distintos programas acceso seguro al hardware de la computadora o en forma más básica, es el encargado de gestionar recursos, a través de servicios de llamada al sistema. Como hay muchos programas y el acceso al hardware es limitado, también se encarga de decidir qué programa podrá hacer uso de un dispositivo de hardware y durante cuánto tiempo, lo que se conoce como multiplexado. Acceder al hardware directamente puede ser realmente complejo, por lo que los núcleos suelen implementar una serie de abstracciones del hardware. Esto permite esconder la complejidad, y proporciona una interfaz limpia y uniforme al hardware subyacente, lo que facilita su uso al programador.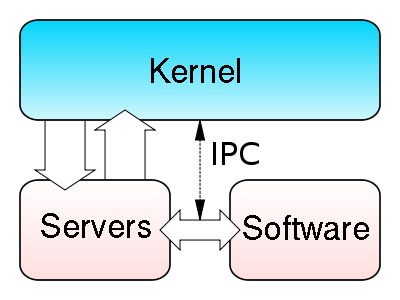
Von Neumann: John von Neumann zu Margaritta (se pronuncia «fon noiman»), (Margittai Neumann János Lajos) (28 de diciembre de 1903 - 8 de febrero de 1957) fue uno de los más grandes matemáticos del siglo XX. Húngaro-estadounidense que realizó contribuciones importantes en física cuántica, análisis funcional, teoría de conjuntos, ciencias de la computación, economía, análisis numérico, cibernética, hidrodinámica (de explosiones), estadística y muchos otros campos de la matemática.
Von Neumann le dio su nombre a la Arquitectura de von Neumann, utilizada en casi todos los computadores, por su publicación del concepto; aunque muchos piensan que este nombramiento ignora la contribución de J. Presper Eckert y John William Mauchly, quienes aportaron al concepto durante su trabajo en ENIAC.1 Virtualmente, cada computador personal, microcomputador, minicomputador y supercomputador es una máquina de von Neumann. También creó el campo de los autómatas celulares sin computadores, construyendo los primeros ejemplos de autómatas autorreplicables con lápiz y papel. El concepto de constructor universal fue presentado en su trabajo póstumo Teoría de los Autómatas Autorreproductivos. El término "máquina de von Neumann" se refiere alternativamente a las máquinas autorreplicativas. Von Neumann probó que el camino más efectivo para las operaciones mineras a gran escala, como minar una luna entera o un cinturón de asteroides, es a través del uso de máquinas auto-replicativas, para tomar ventaja del crecimiento exponencial de tales mecanismos.
Adicional a su trabajo en arquitectura computacional, von Neumann es acreditado con al menos una contribución al estudio de algoritmos. Donald Knuth denomina a von Neumann como el inventor, en 1945, del conocido algoritmo merge sort, en el cual la primera y segunda mitad de un array (vector) son cada una clasificadas recursivamente y luego fusionadas juntas.
También se comprometió en la investigación de problemas en el campo de la hidrodinámica numérica. Junto con R. D. Richtmyer desarrolló un algoritmo definiendo viscosidad artificial, que probó la esencia para el entendimiento de las ondas de choque. Puede decirse que no entenderíamos mucho de astronáutica y ni siquiera habríamos desarrollado jets y motores espaciales sin ese trabajo. El problema a resolver era que cuando los computadores resuelven problemas hidro o aerodinámicos, buscan poner muchos puntos de rejilla (o malla, en inglés grid) computacionales en regiones con onda de choque de discontinuidad aguda. La viscosidad artificial era un truco matemático para suavizar levemente la transición del choque sin sacrificar la física básica.
Direccionamiento: En computación el direccionamiento segmentado, es una de las formas más comunes de obtener protección de memoria. Otra forma es la paginación.
Consiste en dividir el espacio de direcciones virtuales que puede direccionar un procesador en segmentos. Estos segmentos pueden tener distintos tamaños.
Cada segmento almacena un tipo de información (datos, instrucciones, pila, heap...). En función del tipo de información tiene unos permisos asociados (lectura, escritura o ejecución).
Cada segmento pertenece a un proceso, o a varios (cuando se comparten datos). Si un proceso intenta acceder (leer o escribir) en memoria que no le pertenece resultará en una falla de segmentación.
Es necesaria política de ubicación, extracción y reemplazamiento.
Sistemas operativos 32 bits y 64 bits: En arquitectura de computadoras, 64 bits es un adjetivo usado para describir enteros, direcciones de memoria u otras unidades de datos que comprenden hasta 64 bits (8 octetos) de ancho, o para referirse a una arquitectura de CPU y ALU basadas en registros, bus de direcciones o bus de datos de ese ancho.
Los microprocesadores de 64 bits han existido en las supercomputadoras desde 1960 y en servidores y estaciones de trabajo basadas en RISC desde mediados de los años 1990. En 2003 empezaron a ser introducidos masivamente en las computadoras personales (previamente de 32 bits) con las arquitecturas x86-64 y los procesadores PowerPC G5.
Aunque una CPU puede ser internamente de 64 bits, su bus de datos o bus de direcciones externos pueden tener un tamaño diferente, más grande o más pequeño y el término se utiliza habitualmente para describir también el tamaño de estos buses. Por ejemplo, muchas máquinas actuales con procesadores de 32 bits usan buses de 64 bits (p.ej. el Pentium original y las CPUs posteriores) y pueden ocasionalmente ser conocidas como "64 bits" por esta razón. El término también se puede referir al tamaño de las instrucciones dentro del conjunto de instrucciones o a cualquier otro elemento de datos (p.ej. las cantidades de 64 bits de coma flotante de doble precisión son comunes). Sin más calificaciones, sin embargo, la arquitectura de las computadoras de 64 bits tiene integrados registros que son de 64 bits, que permite soportar (interna y externamente) datos de 64 bits.
La principal desventaja de las arquitecturas de 64 bits es que, con respecto a las de 32 bits, los mismos datos ocupan ligeramente más espacio en memoria debido al crecimiento de los punteros y posiblemente otros tipos y al relleno para alineamiento (dependiendo del tipo de programa, algunos pueden multiplicar su tamaño). Esto incrementa los requisitos de memoria de un proceso dado y puede tener implicaciones para el uso eficiente de la caché del procesador. Mantener un modelo parcial de 32 bits es una manera de manejar esto y es en general razonablemente efectivo. De hecho, el sistema operativo de altas prestaciones Z/OS ha escogido este enfoque actualmente, requiriendo que el código de programa resida en varios espacios de direcciones de 32 bits mientras que los objetos de datos pueden (opcionalmente) residir en regiones de 64 bits.
MS-DOS: es un sistema operativo perteneciente a la familia DOS comercializado por Microsoft para el IBM PC.
MS-DOS se desarrolló a partir de QDOS, Quick and Dirty Operating System, también conocido como 86-DOS. Su desarrollo se inició oficialmente en 1981 y fue lanzado en 1982 como MS-DOS 1.0. Tuvo ocho versiones principales y alcanzó gran difusión pero fue gradualmente reemplazado por sistemas operativos que ofrecían una interfaz gráfica de usuario (GUI), en particular, por varias generaciones del sistema operativo Microsoft Windows.
Microsoft detuvo su desarrollo en el año 2000.MS-DOS es un sistema operativo monotarea y monousuario para ordenadores personales
MS-DOS se desarrolló a partir de QDOS, Quick and Dirty Operating System, también conocido como 86-DOS. Su desarrollo se inició oficialmente en 1981 y fue lanzado en 1982 como MS-DOS 1.0. Tuvo ocho versiones principales y alcanzó gran difusión pero fue gradualmente reemplazado por sistemas operativos que ofrecían una interfaz gráfica de usuario (GUI), en particular, por varias generaciones del sistema operativo Microsoft Windows.
Microsoft detuvo su desarrollo en el año 2000.MS-DOS es un sistema operativo monotarea y monousuario para ordenadores personales
Windows
Linux
MacOS
SCO
VMS
MVS
Sistema operativo monolítico
Proceso por lotes
Monousuario - multiusuario
Monotarea - multitarea
Monoprocesador - multiprocesador
Proceso batch
Algoritmos de planificación
Máquina virtual
Debian
Ubuntu
Red Hat
Fedora
Suse